项目组提出了基于商用RFID设备的非接触式感知系统。感知的目标本身不需要携带任何设备或标签,大大拓展了系统的应用范围减少了实际使用时的开销。在定位追踪方面,可以做到对低速运动物体的非接触式的厘米级追踪,同时兼顾高精度与实时性。为了实现高精度,将便宜的标签阵列用作天线阵列,多个分散的标签弱化了目标角度和环境噪声的影响。此外利用两次相位差分,消除了环境多径以及设备差异导致的误差。而在实时性方面,由于相位数值的周期性,在整个测量区域会出现水波纹一样的波动。传统方法计算最优值需要遍历整个区域,而项目组所提出的方法,充分考虑到物体运动的连续性,在局部区域可以将目标函数看作凸函数,大大降低了计算复杂度。
除了传统的定位追踪,项目组利用RFID信号模拟人耳朵和眼睛的功能,对收集的信号进行傅里叶变换,将时域信号转换成频域信号即可得到风扇的转速。以此为基础,项目组构建了振动设备的“指纹”,不同的设备物理结构会导致设备振动时产生不同的杂波,在RFID系统中体现出不同的频谱特征,利用这个频谱来当作设备的指纹。项目组在安徽淮南的潘三电厂做了实际的测试:分别为引风机,真空泵,凝水泵,平均误差在0.5Hz(45Hz/40Hz/30Hz),误差率在1%;细节如图1所示,上述两项成果均发表于INFOCOM 2019 (CCF A类会议)。
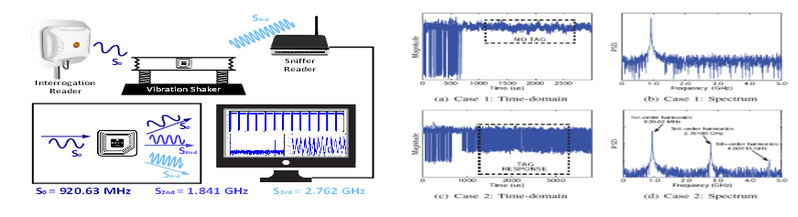
图1. 基于商用RFID标签的非侵入式振动检测